

Функція балансування швидкості веденого приводу
мая 27, 2021
Функція настройки балансу швидкості
Головні принципи:
- Працює тільки в режимі FLUX (замкнутий швидкісний контур);
- Мета використання: розподіл між двигунами, які мають механічну зв'язок, навантаження;
- Одіна завдання для всіх приводів;
- Функціонування за принципом «ведучий-ведений»;
- Ведений працює в режимі швидкості, при можливості балансування швидкості по крутний момент;
- Ведучий - в швидкісному режимі.
Функція швидкісного балансу
Основні принципи:
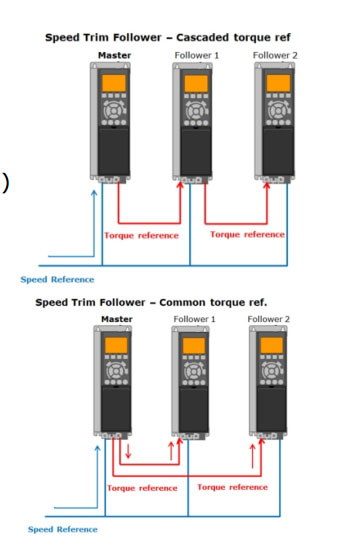
- Швидкісний баланс є функцією порівняння крутять моментів веденого двигуна і ведучого;
- Можна задавати моменти за каскадним принципом;
- Число відомих приводів обмежується трьома одиницями;

Функція швидкісної балансування
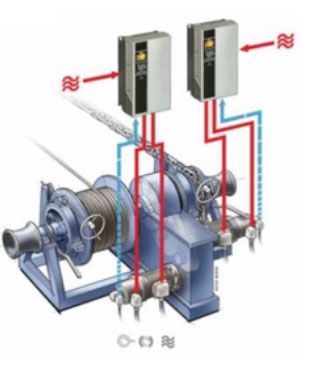
Області використання:
- корабельні лебідки, висотні крани, дифузійні апарати, а також інше обладнання з валами двигунів, які механічно між собою пов'язані.
Переваги:
- Висока надійність даного рішення з резервуванням приводів;
- Постійна підтримка точно встановленої швидкості, завдяки чому динамічна помилка знижується
- Рівномірний розташування навантаження в швидкісному діапазоні, в тому числі і нульової швидкості.
Функція дотримання балансу швидкості
Опис характеристик
Привід ведучий:
- Робота в режимі «FLUX with motor feedback» (пар. 1-01);
- Замкнуте швидкісний контур (пар. 1-00);
- Джерело, що забезпечує зворотний зв'язок по швидкості - енкодер моделі 24В або ж плата енкодера модифікації МСВ102 (пар. 1-02);
- Аналоговий вихід AO42, що подає сигнал крутного моменту:
Параметр 6-50 = [149] Torque% lim 4-20 mA;
Параметр 6-51 = 0%;
Параметр 6-52 = 100%.

Функція балансування швидкості
список параметрів
Привід ведений:
- Швидкісний контур замкнутий (пар. 1-00);
- робота в режимі «FLUX with motor feedback» (параметр 1-01);
- для швидкості джерело зворотного зв'язку, може бути використана плата енкодера МСВ102, яку нерідко замінює енкодер 24В (пар. 1-02);
-
сигнальний джерело зворотного зв'язку крутного моменту (від ведучого приводу) - аналоговий вхід 54:
- Параметр 6-22 = AI54 з низьким електричним струмом = 4 mA;
- Пар. 6-23 = AI54 з високим показником струму = 20 mA;
- Параметр 6-24 становить 0%;
- Параметр 6-25 дорівнює 100% (максимум)

Функція швидкісної балансування
Загальні дані Привід ведений:
-
джерело сигналу зворотного зв'язку, орієнтованої по моменту (від ведучого приводу), являють собою звичайний аналоговий вхід 54:
- Параметр 7-10 = Torque Feedback Source, що дорівнює AI54.
-
Настроювання (забезпечення балансу) швидкості і відомого приводу:
- Параметр 7-01 = Speed PID Droop - [рівень падіння (підстроювання) рівня швидкості, прямо пропорційно крутним моментів.
